SimWorld Studio:
SimWorld Studio:
Automatic Environment Generation
with Evolving Coding Agent
for Embodied Agent Learning
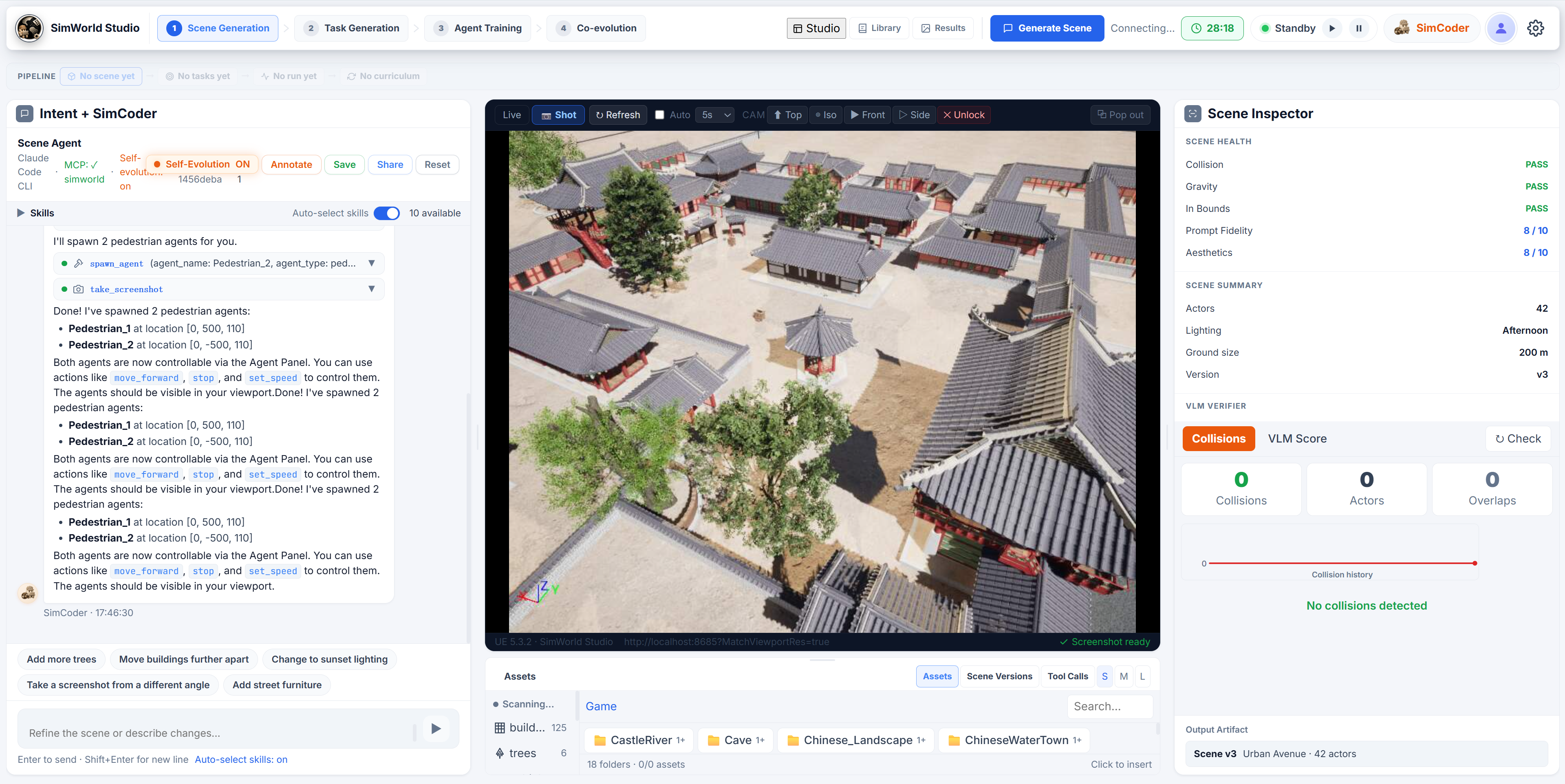
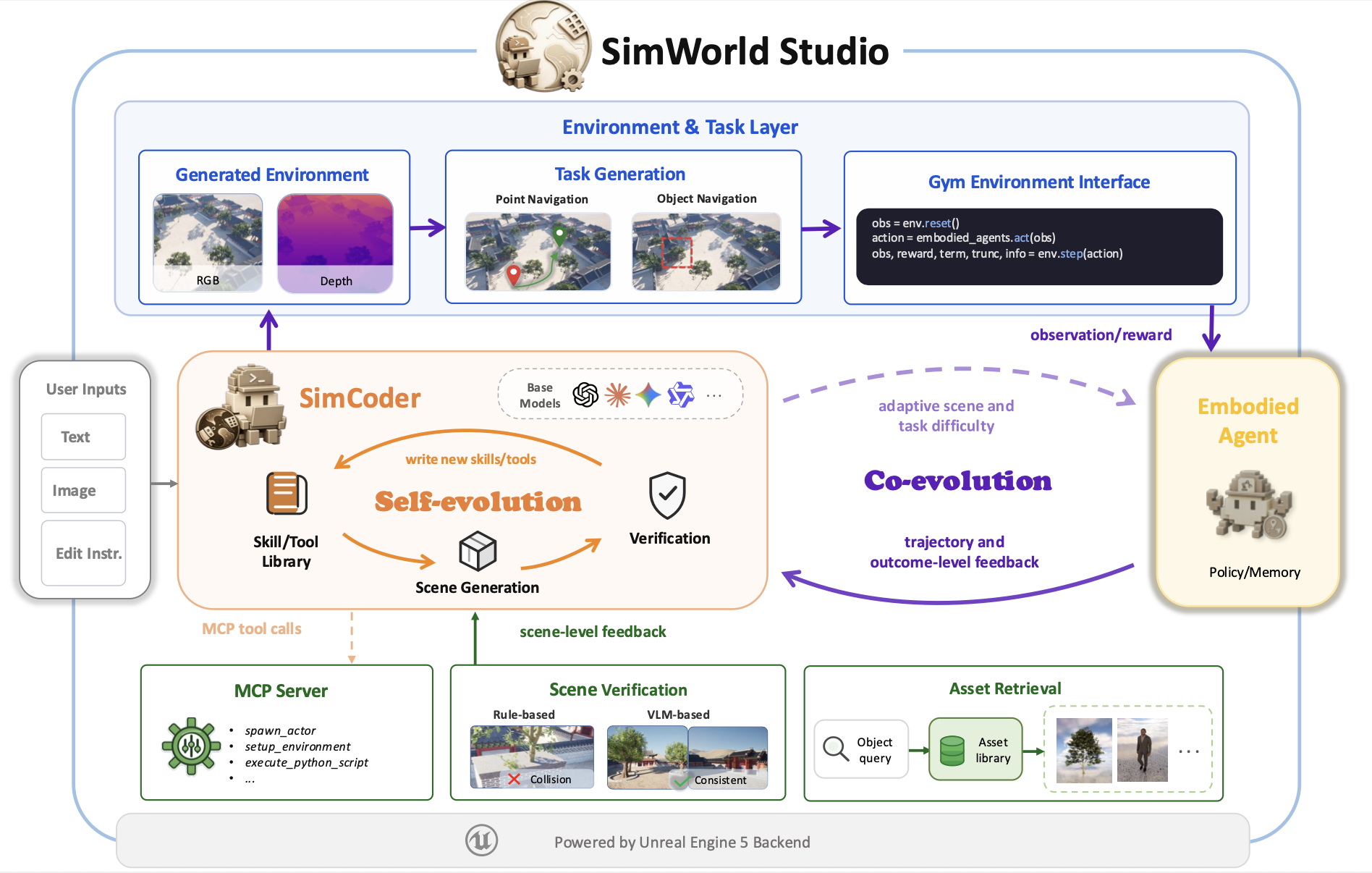
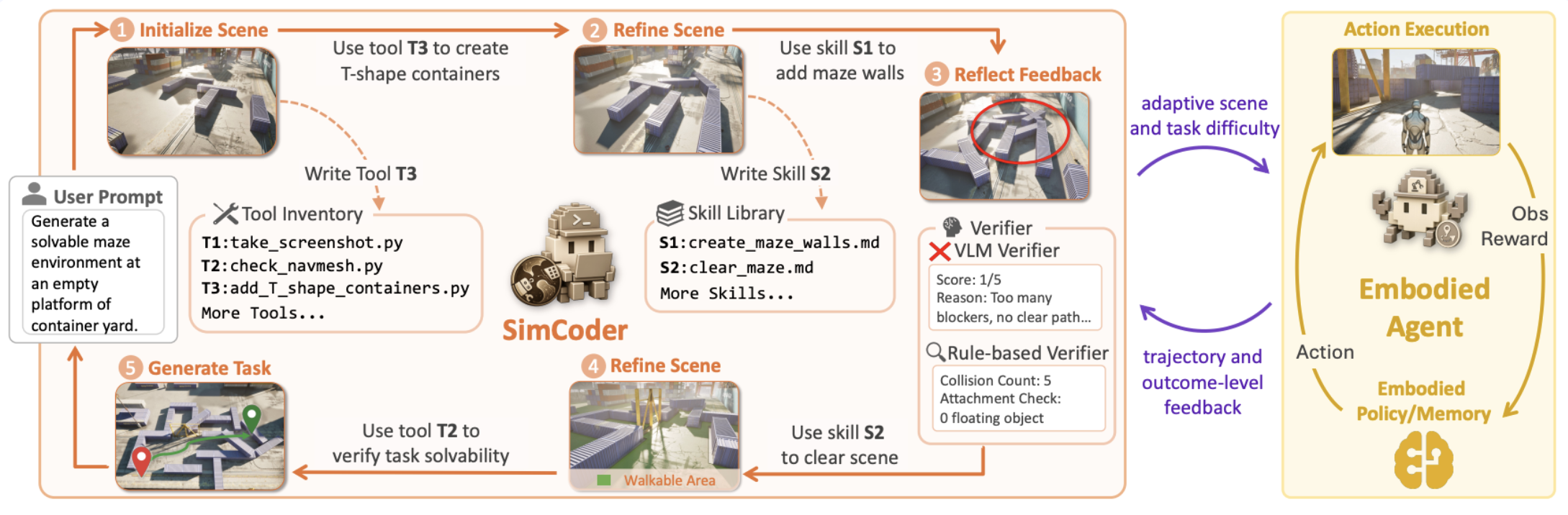
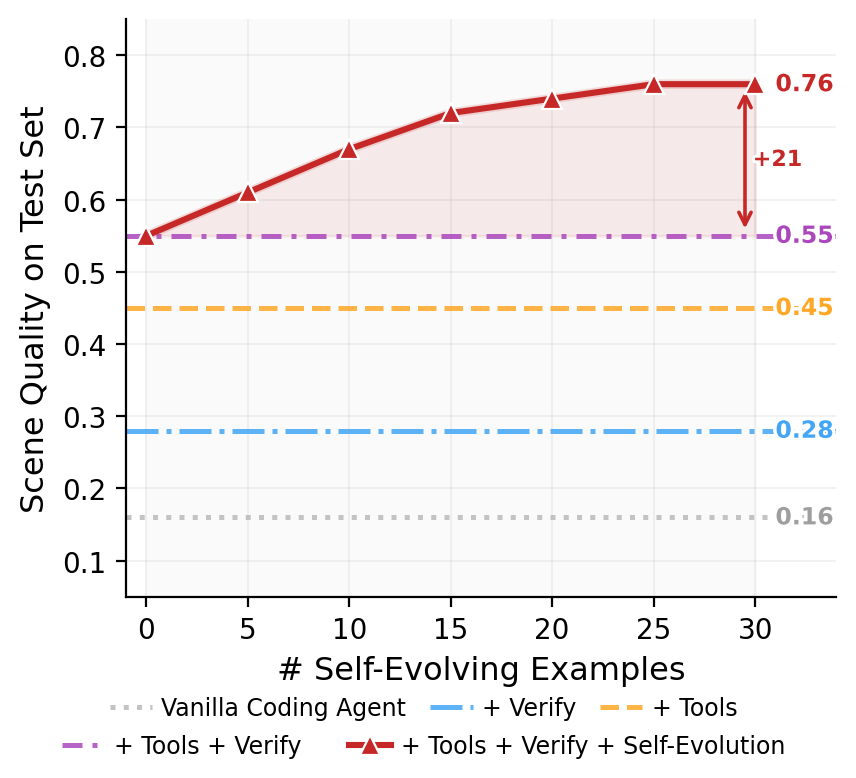
An open-source platform built on Unreal Engine 5 that generates interactive, physically-grounded 3D environments from natural language, with self- and co-evolution for embodied AI training.
1University of California San Diego 2New York University *Equal contribution
0.98+
Collision-free rate
physical validity
+12pp
Cross-env transfer
to SimWorld-MMNav
+18pp
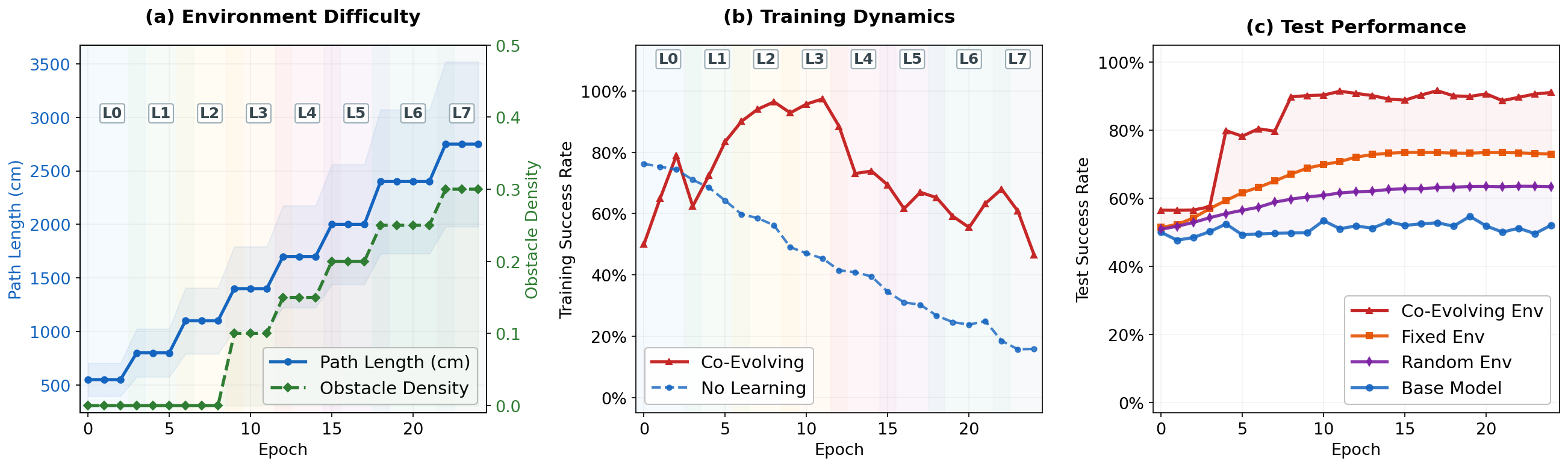
Co-evolution SR gain
over fixed curriculum